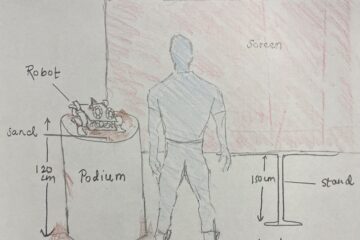
Overview picture / sketch
Theme and Story
In the distant future, millions of years after an apocalyptic event has erased life from Earth, an extraordinary alien-made rover named ‘AEOLUS’ embarks on a daring mission to explore and uncover the secrets of our once-thriving planet. AEOLUS is a testament to the eternal quest for life, resilience, and exploration, only this time, Earth is the desolate world being traversed. Despite the monumental challenges presented by Earth’s transformation into a vast, global desert, AEOLUS courageously traverses this new terrain, mirroring the Perseverance rover’s purpose with a profound twist. AEOLUS’s mission is driven by the same curiosity that propelled human rovers to distant worlds. Equipped with advanced alien technology, it delves into the mysteries of Earth’s past, searching for signs of life that may have endured the cataclysmic events that reshaped our planet. As AEOLUS journeys across the arid landscapes, it captures breathtaking images of the transformed Earth, unravels geological history, and analyzes the chemistry of the arid soils to comprehend how Earth’s life once flourished and how it may one day thrive again. With its extraordinary capabilities and unwavering determination, AEOLUS stands as a symbol of hope for the potential resurgence of life on Earth, this time from an extraterrestrial perspective. This remarkable rover explores Earth with the hope that one day, life, whether it be alien or human, will once again thrive on our home planet. AEOLUS’s journey stands as a testament to the enduring spirit of exploration and the relentless pursuit of life in the vast cosmic expanse.
Project Description
AEOLUS (or whatever the name is) is a navigation robot with a sand-resistant coating to withstand the harsh conditions that moves around the desert in search of water and life. Its movement is triggered by the flowing of the wind. It follows the direction from where the wind is blowing and finds high points in the desert (generally the top of the dunes). From there, it observes the surrounding landscape and tries to locate possible signs of water and life.
Interaction Design
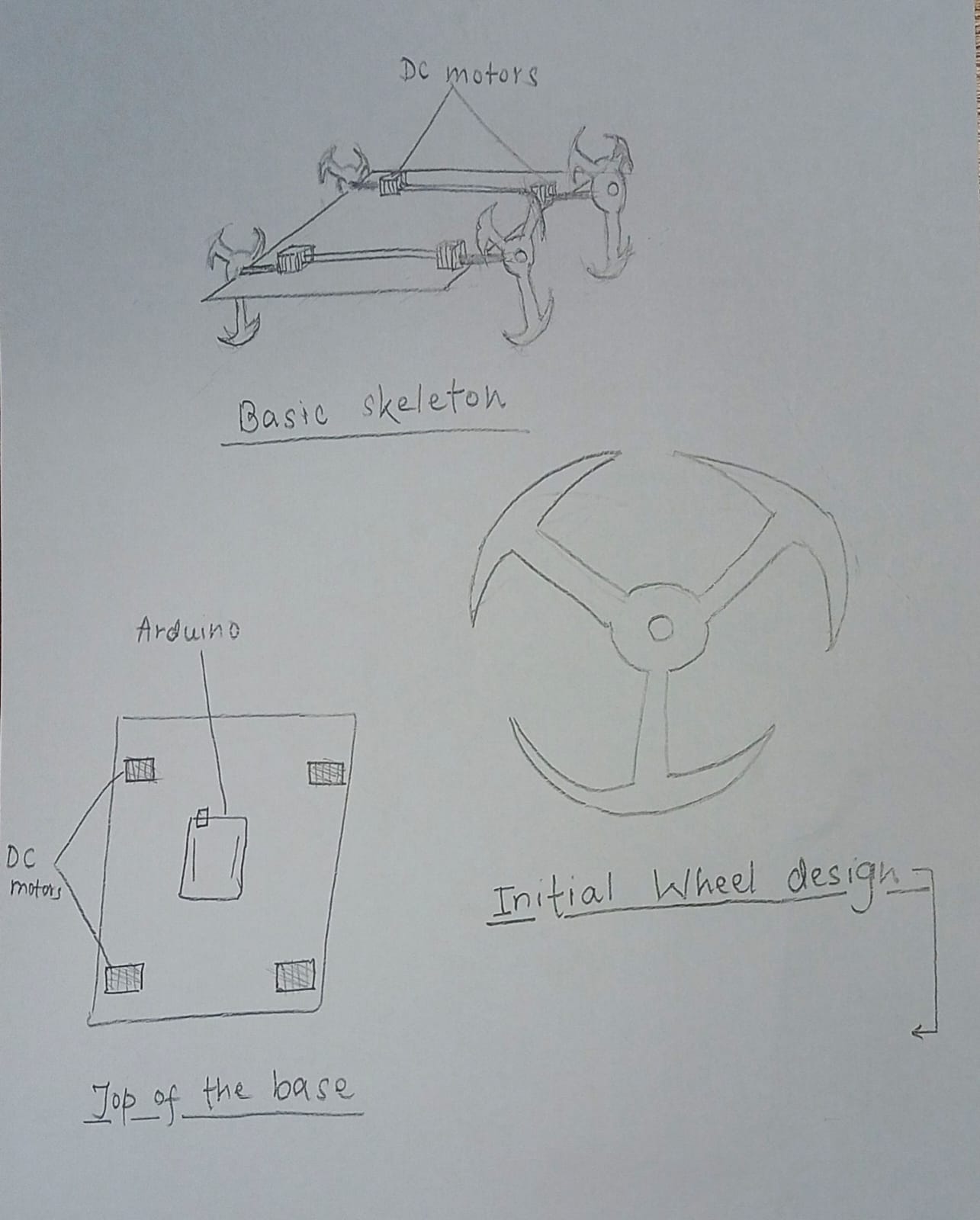
AEOLUS has a tilt sensor attached to the top of it, with which it senses the direction of the wind. It has four big wheels on its side, which have three spokes sticking out each having an arc of a rim of its own with no two rims touching each other. These make it move in the sand in the same direction as that of the wind. Since dunes are formed with the blowing of the wind making the sand stack up, AEOLUS following the direction of the wind will actually be leading it to the top of a dune. Being in a deserted post-apocalyptic place, the top of a dune would be an ideal spot to scan the surrounding area. From there, it looks to find any sign of life around.
Technical Implementation
Aeolus would use the following sensors to seek life on Earth-
- Tilt sensor : Detect the direction of wind and follow along, hoping to reach the apex of a dune to be able to scout a larger part of the desert
- PIR sensor : Detect motion and be in a close proximity to the life found
- Wheels and Axles : 3D print the wheels and axles to ensure that the robot climbs uphill
- Enclosure : Sand-protected enclosure to ensure the motors and other sensors work at their full capacity regardless of the desert environment
Progress Documentation
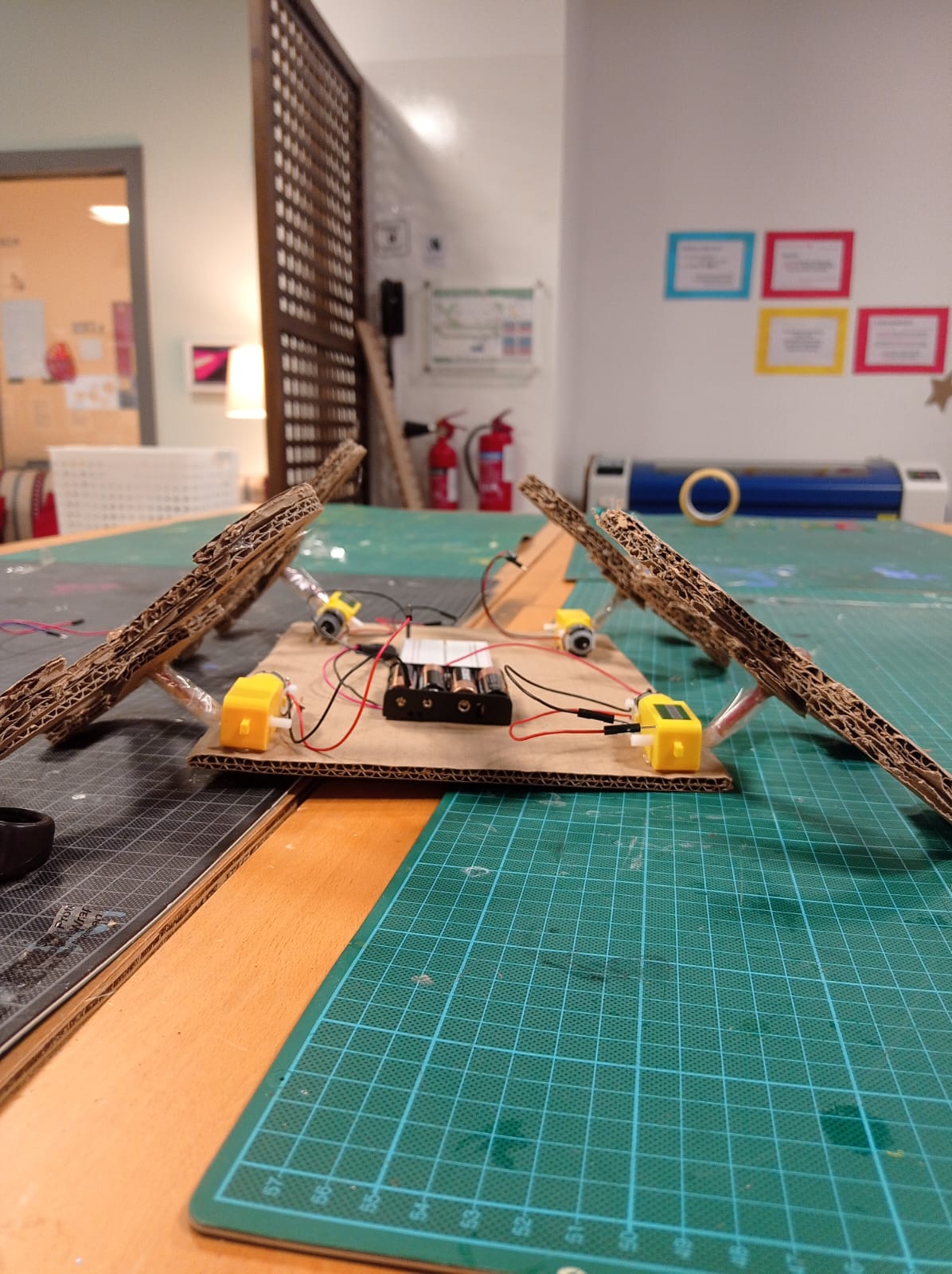
The first prototype we tried to build was made up of cardboard. We made four wheels to go to the front and the back of the robot – each attached to a DC motor. The wheels were peculiarly shaped as mentioned before – with three spokes sticking out each having an arc of a rim of its own with no two rims touching each other. The purpose of this prototype was to see if the robot could move on sand and/or climb up a dune. It was to test out the compatibility of the wheel’s shape with sand to be more specific. However, it wasn’t successful as it broke down pretty easily on a concrete surface – we didn’t even take it to sand. The possible reason for its failure were the loosely attached wheels that it had. We didn’t account for the size of the motor’s shaft and how we could attach the wheel to the shaft. We resorted to a combination of hot glue and tape, which evidently didn’t work.Moving forward, we hope to 3D print this connection to enhance structural integrity. For this, our group needs to learn to 3D print 🙂

Implementation Plan
To complete this project, we will approach it in key stages:
- Design: We’ll design the robot’s body and wheels using 3D printing software, making sure they’re optimized for movement in sand.
- Print and Assemble: After designing, we’ll use a 3D printer to create the body and wheels. Then, we’ll assemble the parts, install the batteries and motors on each wheel, and attach the wind vane to the servo motor on top of the robot’s body.
- Electronics Setup: We’ll connect the motors and the wind vane sensor to a microcontroller programmed with CircuitPython.
- Programming: We’ll write the code in CircuitPython, which will read the wind direction from the wind vane and control the servo motor to turn the robot. The code will also manage the wheel motors to drive the robot in the direction of the wind.
- Field Trials & Testing: We’ll take the robot to a sandy environment near our university campus to see how it performs and make any necessary adjustments to fine-tune the sensor readings and motor responses.
- Review and Refine: Based on the field trials, we’ll make final tweaks to the design, assembly, and code to ensure the robot can reliably follow the wind.
Potential Tech Required
The robot has 2 tilt sensors (wind direction sensor) attached on top of the robot that detects which way the wind blows. This vane is linked to a small turning motor (servo) motor that can turn the robot to face the wind. The body and the wheels of the robot are made with a 3D printer, making it strong yet light enough to handle sandy terrain. It has four wheels, and each wheel has its own motor so it can move easily through the sand. The robot will be programmed with CircuitPython. When the wind changes, the wind vane tells the motor to turn the robot so it always moves with the wind.
Presentation Link
https://docs.google.com/presentation/d/18p0jJ9yY4T5zi7eIFDVLtcrA95VeqfT_cZ-j9dloM60/edit?usp=sharing