
NOMAD by Aadhar, Ahsen, Ronit and Sudiksha
Origin & Mission
In the distant future, after an apocalyptic event wipes out life on Earth, NOMAD, an alien rover sets out on a mission to explore our once habitable planet. Earth is now known to be a vast desert in NOMAD‘s planet — barren, desolate, and lifeless. NOMAD is here to challenge that. Underneath the glaring harshness of the environment lies a supreme beauty only it possesses. NOMAD journey and story gives us the hope that life, whether human or alien, could yet thrive on Earth. The ethos of NOMAD is a tribute to the undying spirit of exploration and the search for life in the cosmos.
Introduction
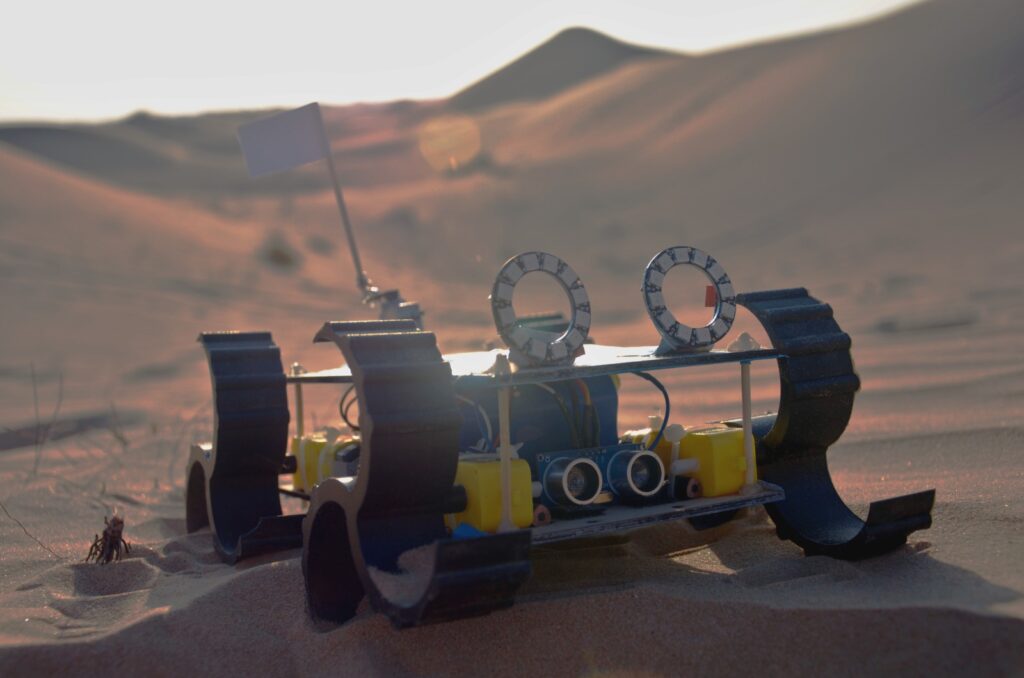
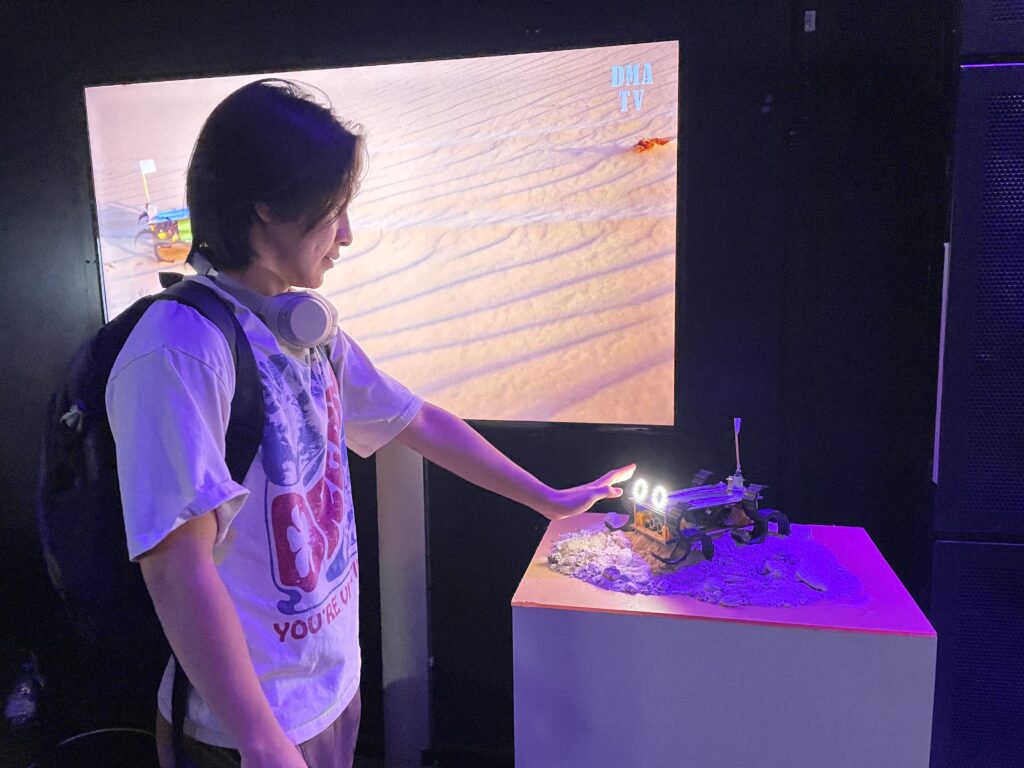
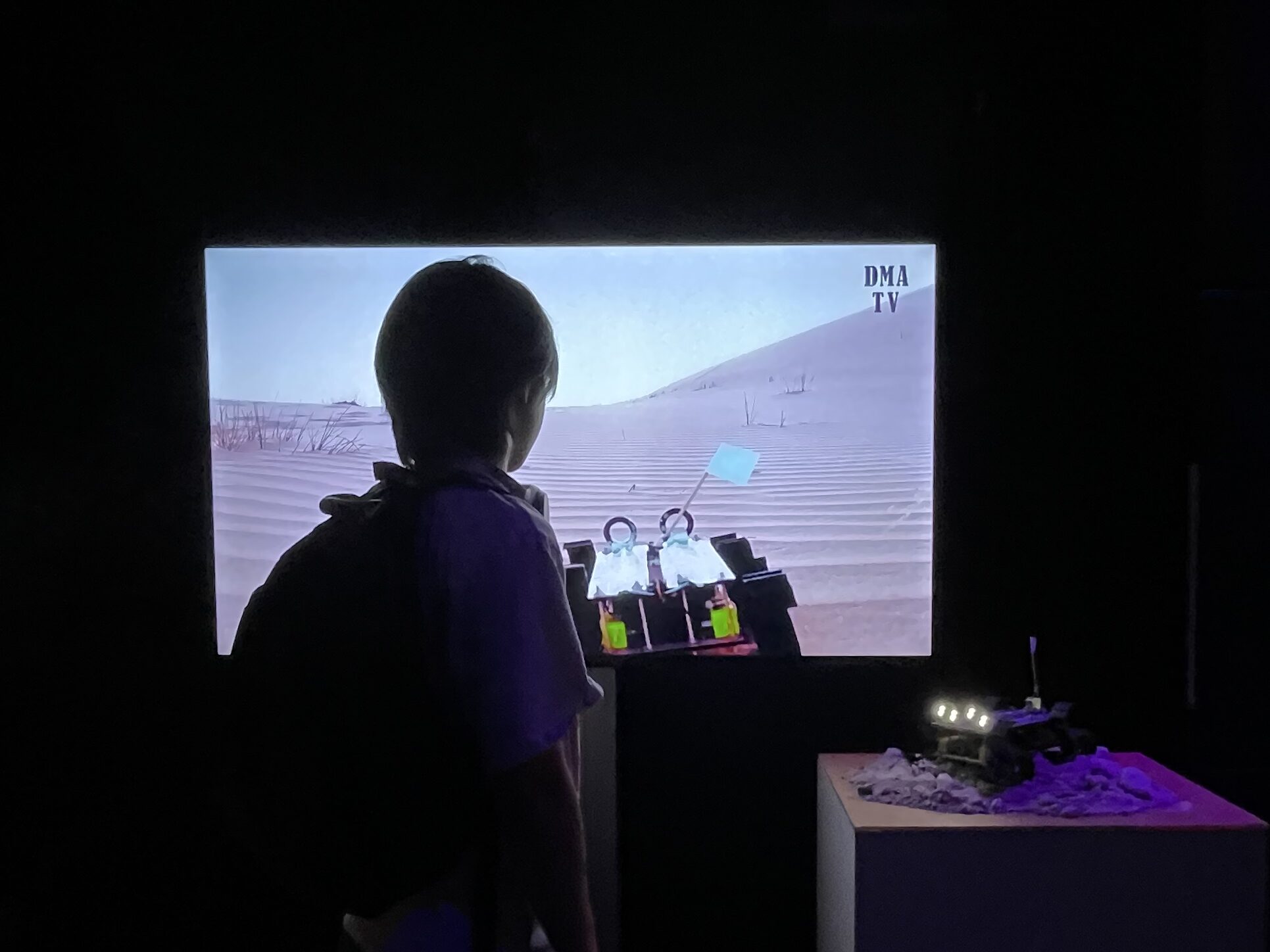
NOMAD is our peace-making, life-searching autonomous rover designed for extra-terrestrial exploration. It was filmed in the Abu Dhabi deserts which sets the stage for the foreign, mysterious terrain of the world in the narrative. It wanders freely, looking for signs of life. On detecting an external presence, NOMAD hopes it is some form of life and immediately stops moving and expresses its amicable motives. To mark its peaceful arrival, it blinks its eyes in a tranquil hue of blue and waves its peace flag. It stores this interaction to be later relayed to its planet from its base station.
NOMAD at Work
Field Installation Video
Field Installation Pictures




IM SHOW Installation – Fall 2023


Technical Implementation & Interaction
The rover’s whegs have been uniquely designed and 3D-printed to navigate desert-like terrain with ease. The Adafruit M4 Express, a Prop-Maker FeatherWing, and a motor driver programmed on CircuitPython form its brain. NOMAD has 2 neopixel rings for its eyes that blink at any obstacle encountered. The 4 DC motors attached to its whegs help NOMAD run around, and a servo motor is used to operate the peace flag-waving mechanism. An Ultrasonic Distance sensor has been integrated for close-range object detection. The rover’s body, laser-cut from wood, precisely accommodates all the components and provides a robust chassis to ensure its continued survival . A conscious effort was also made in choosing the right battery pack to ensure that NOMAD can power through its explorations.
Team Members
Aadhar Wasti, Ahsen Saaim, Ronit Singh, Sudiksha Kalepu
A heartfelt thank you to Prof. Michael Ang for his continuous guidance and valuable feedback during this project.