Phase I
Prototype I:
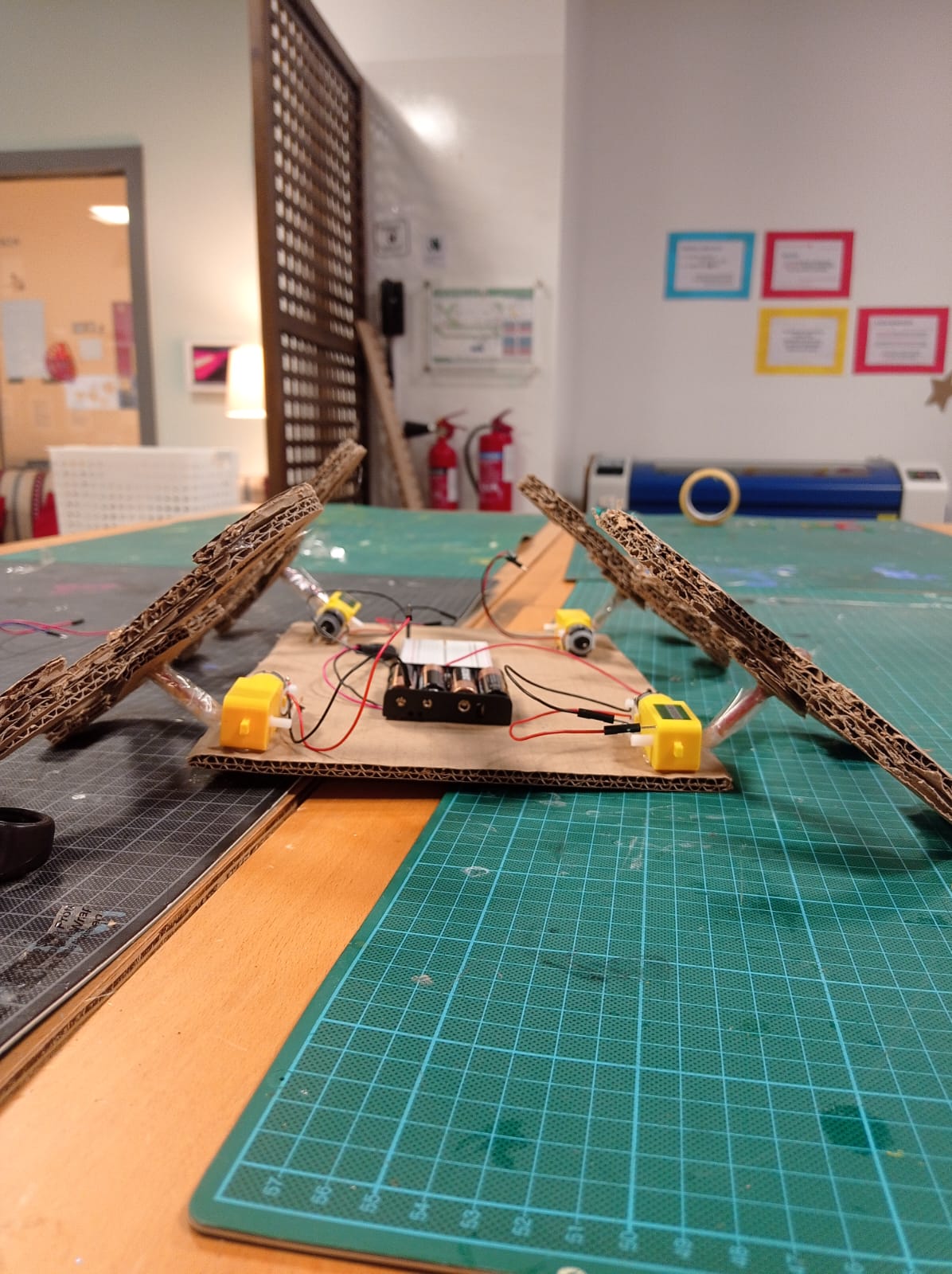
The first prototype we tried to build was made up of cardboard. We made four wheels to go to the front and the back of the robot – each attached to a DC motor. The wheels were peculiarly shaped as mentioned before – with three spokes sticking out each having an arc of a rim of its own with no two rims touching each other. The purpose of this prototype was to see if the robot could move on sand and/or climb up a dune. It was to test out the compatibility of the wheel’s shape with sand to be more specific. However, it wasn’t successful as it broke down pretty easily on a concrete surface – we didn’t even take it to sand. The possible reason for its failure were the loosely attached wheels that it had. We didn’t account for the size of the motor’s shaft and how we could attach the wheel to the shaft. We resorted to a combination of hot glue and tape, which evidently didn’t work.

Phase 2
Moving forward we decided to 3D print the wheels, wheel mounts, and chassis of the rover. Below are 3D models we created on TinkerCAD.
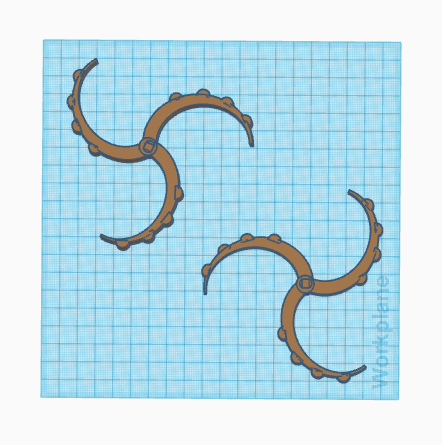
Fig 1.1 Wheels

Fig 1.2 wheel mount
We also plan to use flex sensors to detect wind direction. We can do this by attaching flaps to the sensor to catch the wind and bend. This sends corresponding voltage values to the Adafruit that we can mathematically translate to direction readings. We will use 2 flex sensors to cover all possible wind directions. This data feeds into the rover to drive up a dune. Its goal is to reach the top. The rover will also use a proximity sensor in the front at an angle such that it can detect if the presence of sand ahead of the rover. This feature is to ensure the rover stops at the apex of a dune, once it detects no more sand ahead of it. We still have not tested this out yet, so the idea is still in its planning stage.