by Alreem, Amal, Fady and Mustafa
Last week marked the start of our project development. We explored several directions and experimented with different approaches before finally arriving at a potential solution that we plan to pursue further. In this blog post, I’ll share what we worked on, what succeeded, what didn’t, and why.
- Box
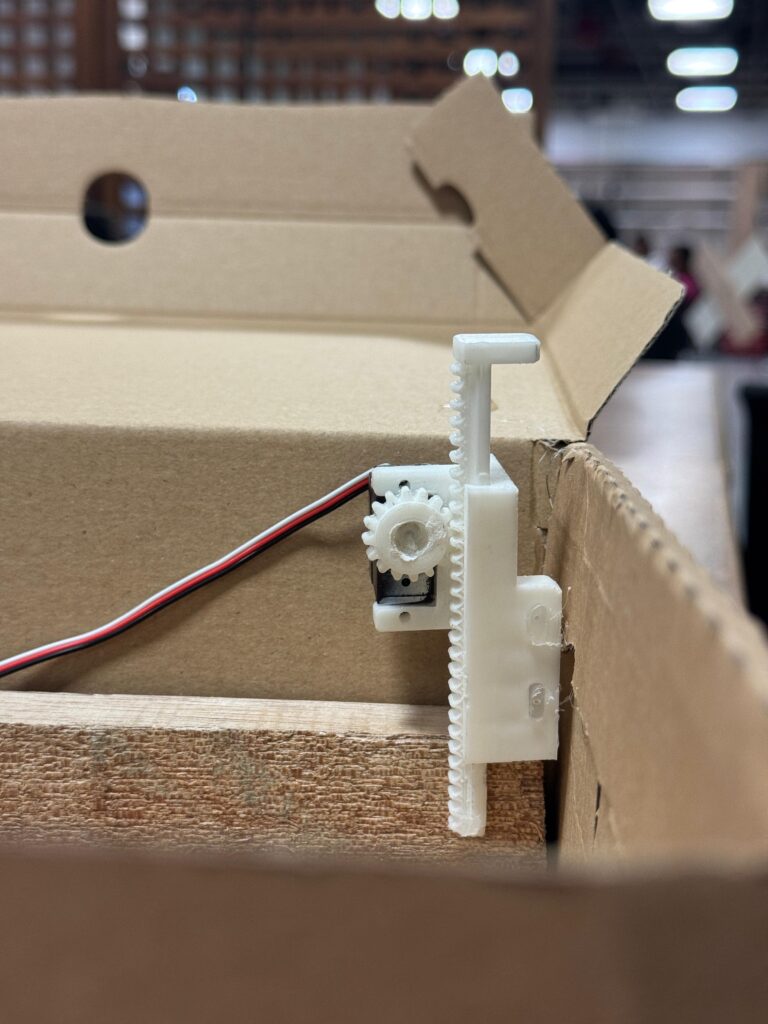
- Gear System (Box Opening)
Our main focus was on how the gear system would operate, as it would be responsible for opening the box. After some discussion, we decided it would be best to experiment with both a gear-based mechanism and a servo to compare their effectiveness.
- Motifs
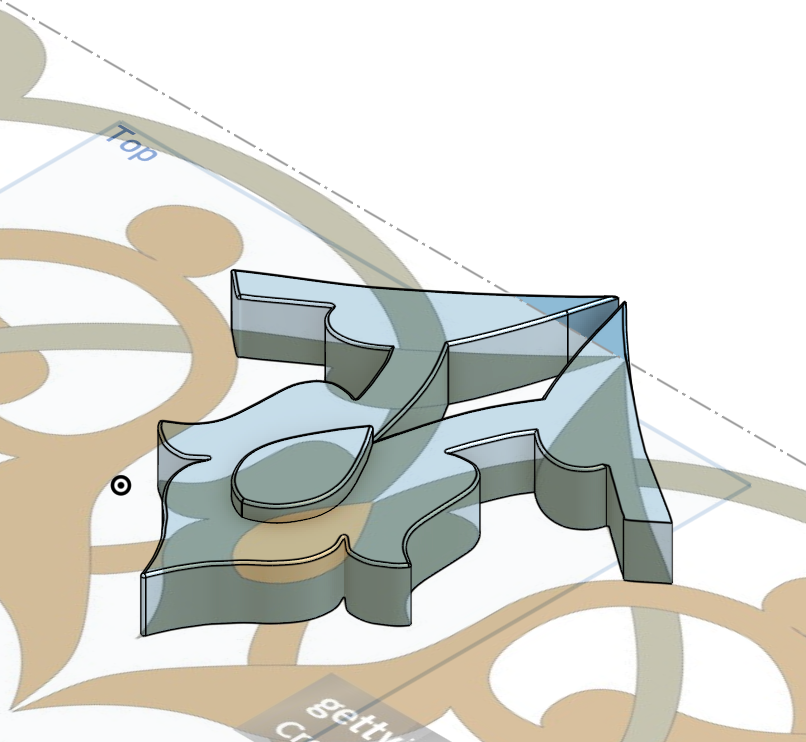
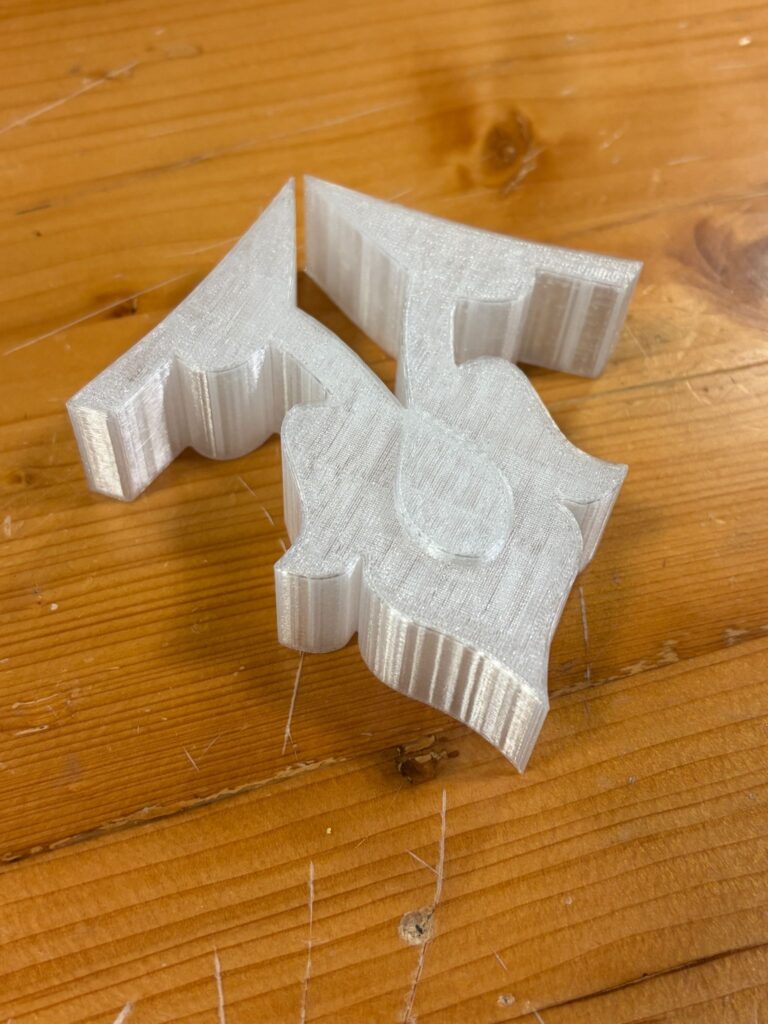
We were initially unsure whether to 3D print our motifs or use the CNC machine to carve them from wood. We began by testing the 3D printing approach, tracing an existing motif from a PNG file to create our model.

We ultimately decided that laser cutting would be the better option after Tony from the scene shop explained that the CNC bit’s round shape would soften the sharp corners in our design.
- Measurements and Design
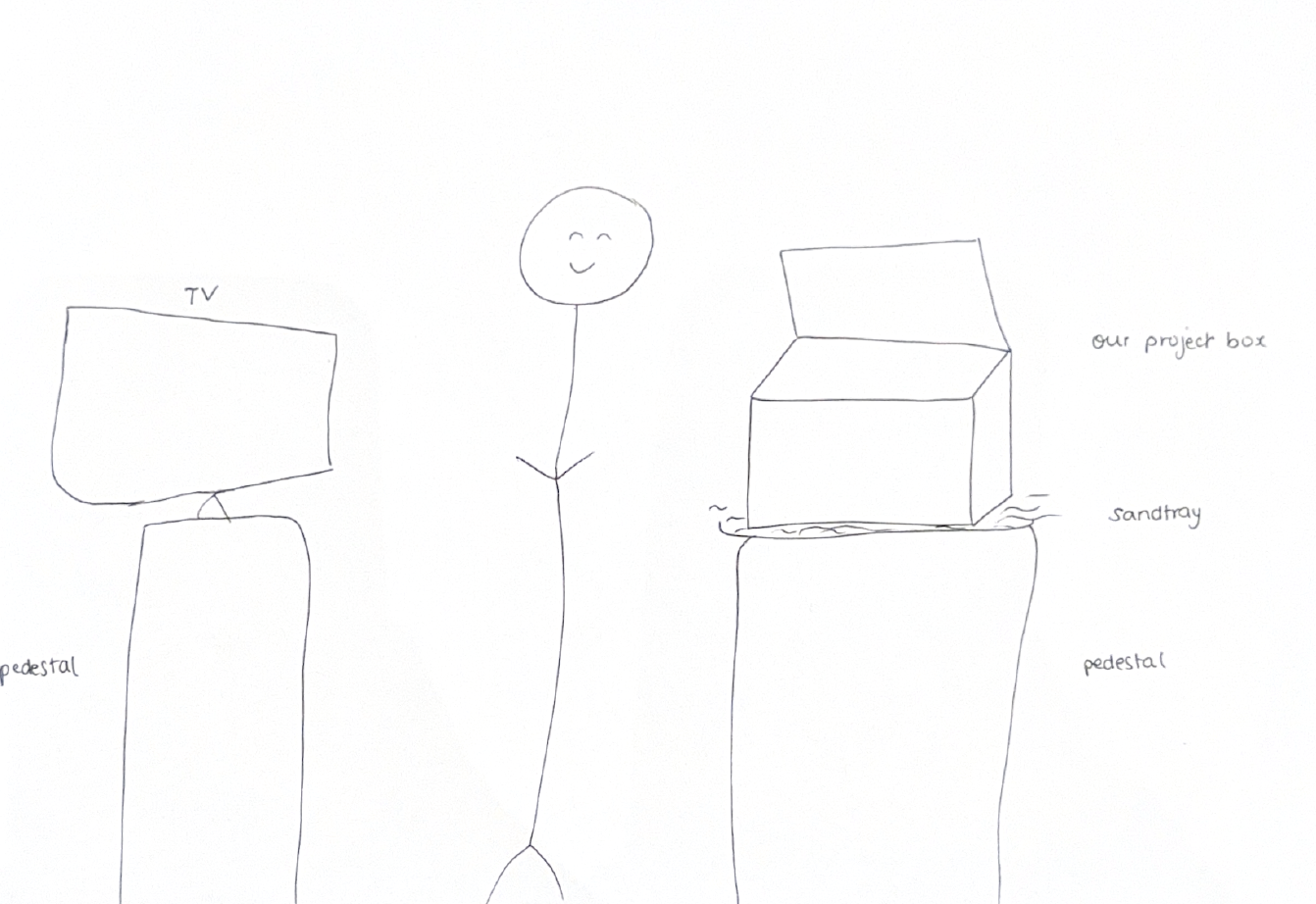
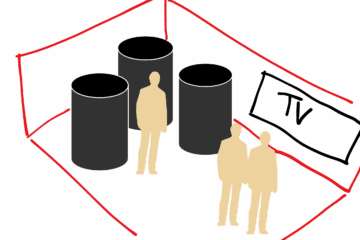
We went back and forth mainly on the box’s size. At first, we envisioned it to be about the size of a typical laptop, but we soon realized that this would be impractical since we needed enough space to house and conceal our components while also leaving room for the objects on top. Additionally, as we revisited our plan to use servo motors for movement, the choice of wood both in material and thickness became crucial for aesthetic and weight considerations. We wanted a material that preserved the natural grain while remaining lightweight.
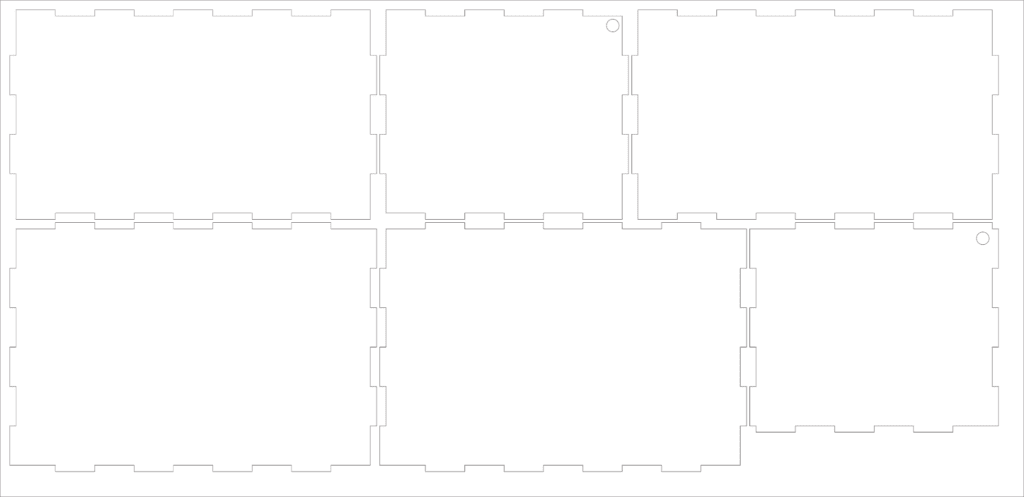
In the end, we decided that laser cutting was our best option it was faster, cleaner, and more efficient. Ultimately, we needed to shift our attention to other aspects of the project, so we chose to move forward with this method.
- Objects Within the Box
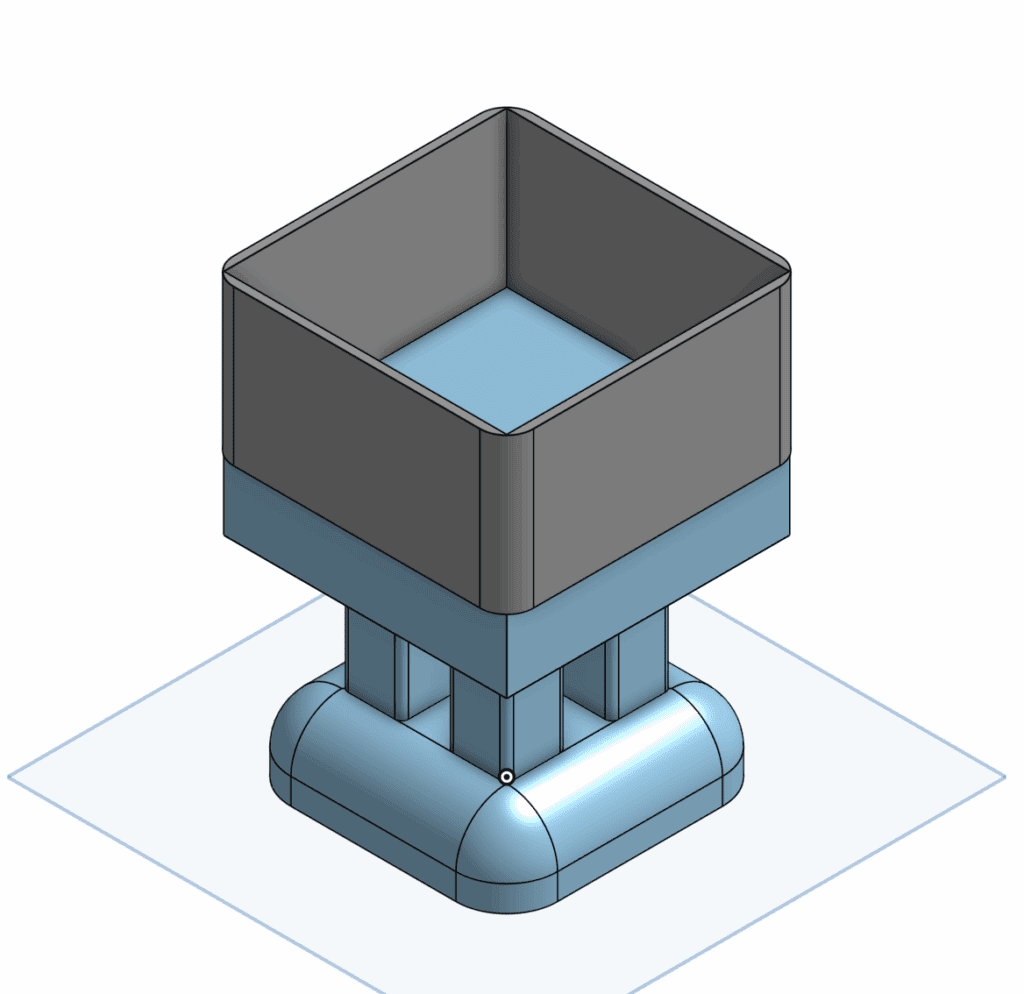
At first, we planned for the objects to be 3D-printed miniature renditions of Emirati cultural items. The example above shows a modernized version of a medkhan (incense burner). However, after researching the load sensor, we realized that our 3D-printed versions would be significantly lighter than the real objects. As a result, we decided to source the actual traditional items from local stores instead.
- Tech
- Load Sensor
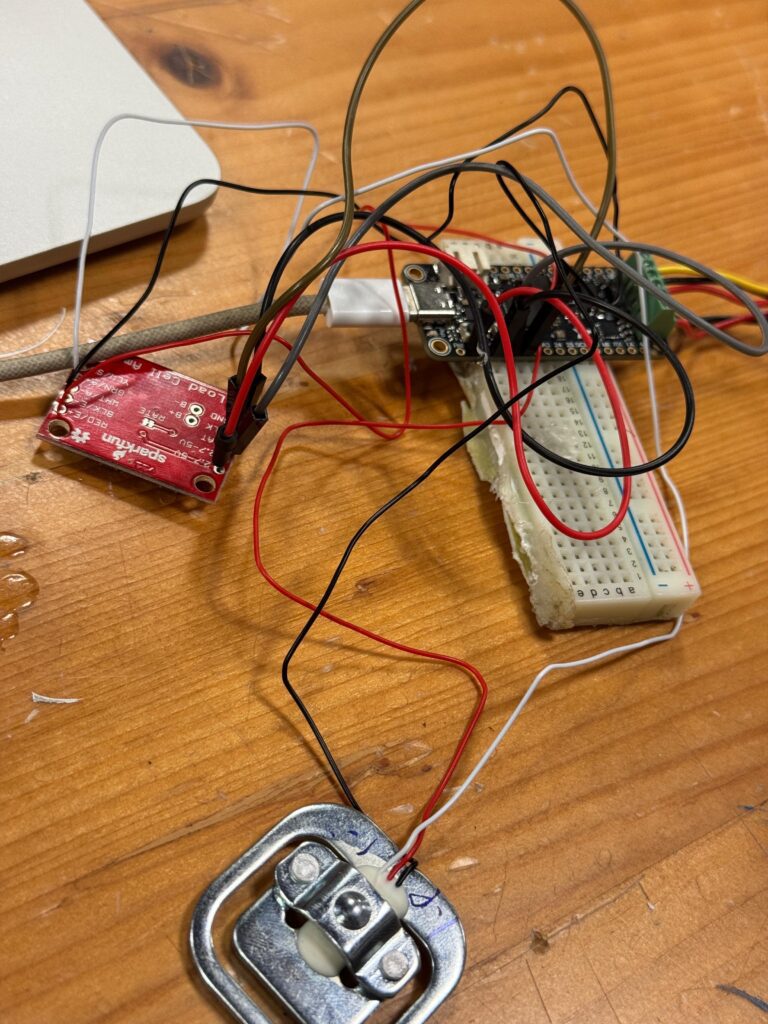
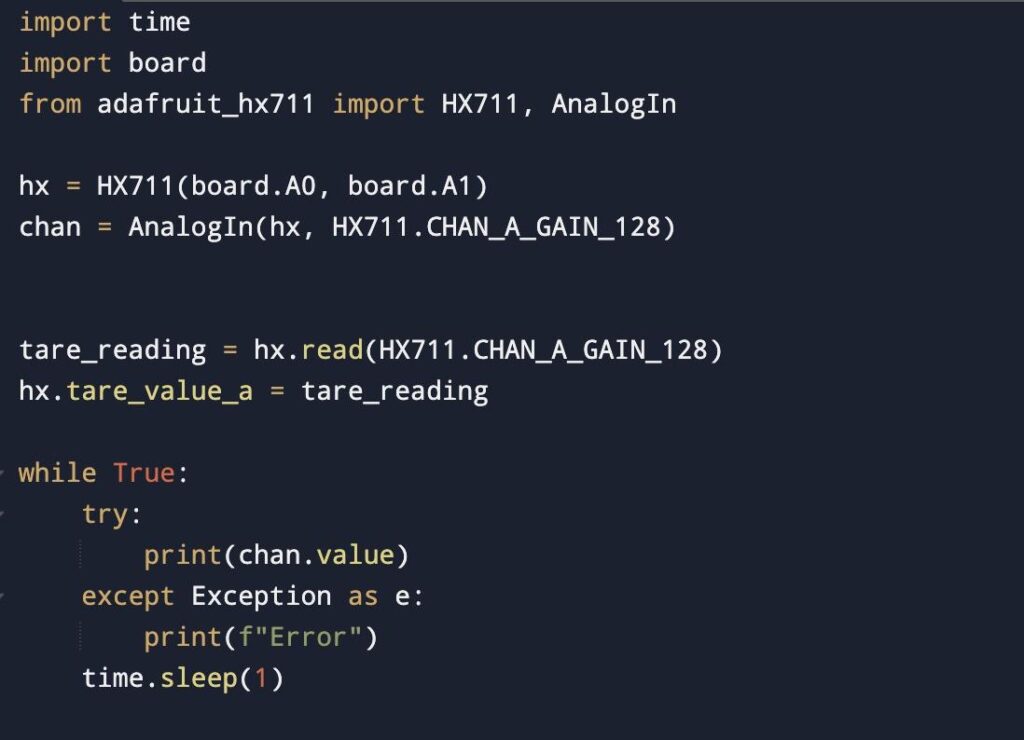
In terms of the Load sensor, we tried out a tutorial that we found online, however this is the only aspect we need refining on. The main issue with it is that the reading were inaccurate and fluctuated a lot, the sensor shower pressure applied when in reality there was nothing.
- Box Opening Mechanism
We plan to mount a servo motor on the inside wall of the box. A long arm will extend from the servo toward the opposite side, and at the center of that arm there will be a shorter arm attached perpendicularly. When the servo moves from 0 to 90 degrees, the perpendicular arm will push the lid upward and open it smoothly.
With this mechanism, we can control how fast the lid opens and closes, and the user won’t need to crank a gear or keep applying force to hold the box open. The servo takes care of the whole movement on its own.