Maximizing performance over granular surfaces
Looking at two research studies concerning robot locomotion over sand and other natural substrates, we observe some common pieces of advice:
- Robots attempting to move across sandy terrain should move their legs more slowly, especially if the sand is loosely packed.
- The speed of the robot (with curved, rotating legs, or “whegs”) was dependant on the durations of the slow and fast phases and the angle at which the limb changed from slow to fast.
- Other factors influencing the robot’s speed include the robot’s “foot” pressure relative to penetration force per unit area per depth and leg length.
Sources:
Why Robots Get Stuck In The Sand — And How To Keep Them Going
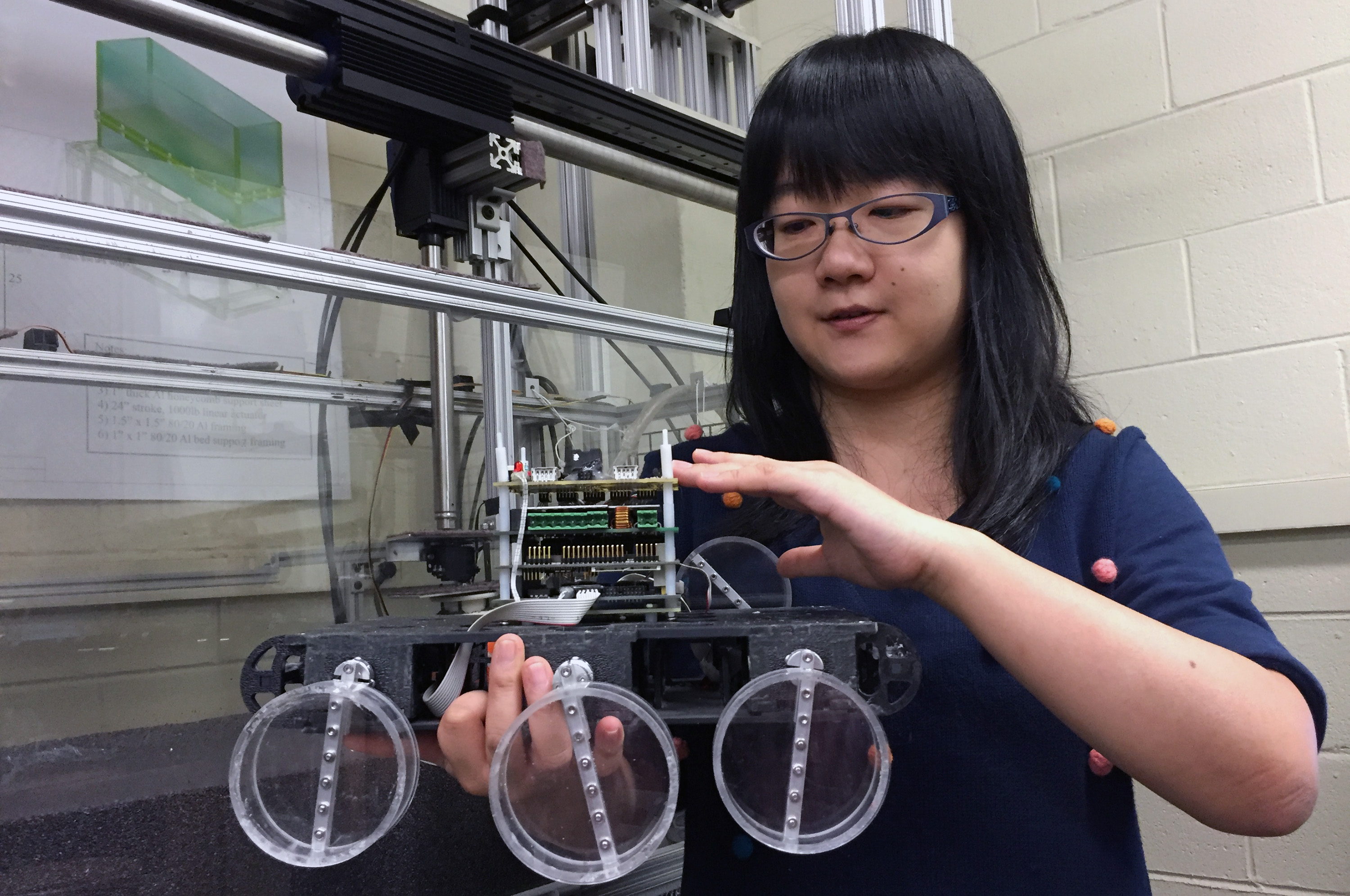
A Terradynamics of Legged Locomotion on Granular Media
This research studied the system of locomotion over granular mediums (with non-uniform dynamics), and developed a model for predicting the motion of legged bodies on granular media for a range of leg shapes and motion speeds.
A Light Touch May Help Animals and Robots Move on Sand and Snow
This research (led by the same lab) aimed to study how the stiffness of a loosely-packed surface affects the ability to move across it. The Sandbot robot’s capabilities were compared to those of five desert-dwelling animals, including lizards and crabs.
These studies are rooted in the field of “terradynamics”, or the study of forces and movement during terrestrial locomotion (particularly that using legs) on ground that can flow such as sand and soil.



0 Comments