While tumbleweeds probably aren’t the first things that come to mind when you think about locomotion in the desert, wind-powered movement is an underrated and sustainable strategy to travel over aeolian (wind-shaped) environments.

Tumbleweed, a robot prototype built by Israeli designer Shlomi Mir, is designed to be robust and adaptive to the desert environment. The steel structure relies on tension, which allows it to transform itself depending on its path. The arrangement of the robot’s sails allow it to catch wind and roll. Using a kinetic generator, the Tumbleweed’s motion powers an onboard computer, sensors and motor.
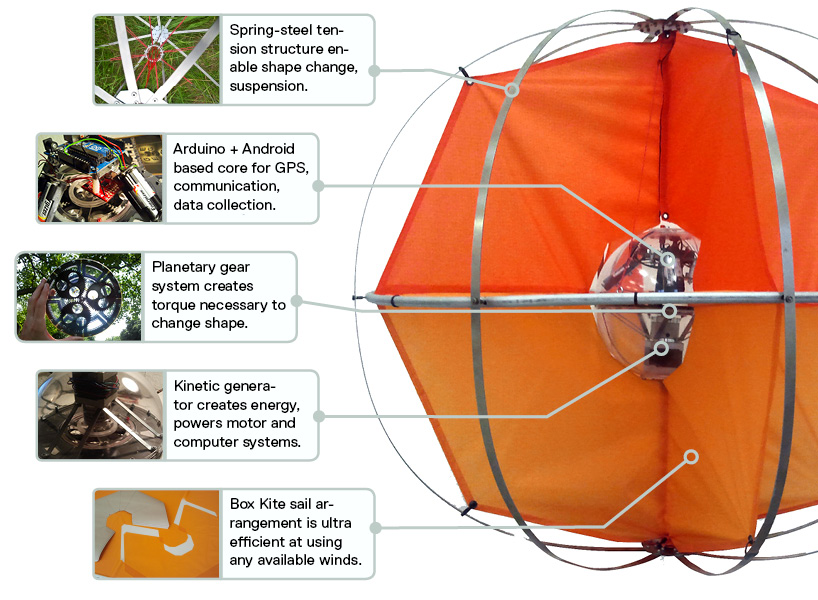
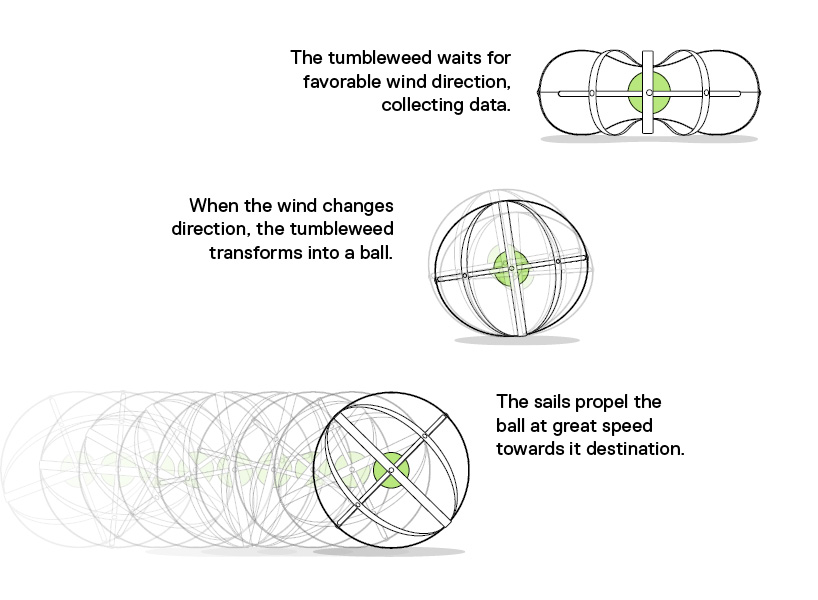
The Tumbleweed can’t control its exact path, but Mir designed it to respond to favorable wind conditions, meaning, the robot will flatten out like a pancake until a gust comes along to propel it in its intended direction.
Below you can see videos of the development of Tumbleweed, as well as field testing at the Tempelhof Airfield in Berlin:
“Tensegrity” Tumbleweed Robot
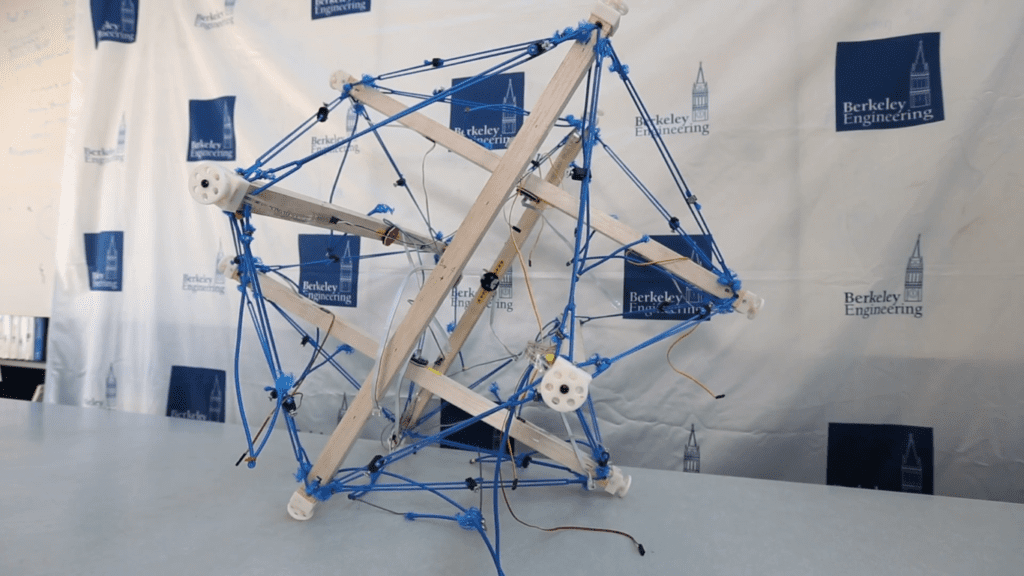
Another approach to the tumbleweed structure is combining elements under tension with elements that are rigid (the titular “tensegrity” approach). Prototypes for a self-propelled tensegrity tumbleweed robot called “Super Ball Bot” are under development at the University of California Berkely in partnership with NASA for applications in space exploration.

Details of this project can be found at Popular Science and IEEE. The Berkeley Emergent Space Tensegrities (BEST) Lab and Fung Institute at Berkely have also been developing a more prototype creation-focused project that utilizes the same technologies, called the Tensegrity Robot Rapid Prototyping Kit, designed to facilitate the assembly of a lo-tech version of the Super Ball Bot.
Below you can find videos of the project pitch for the Rapid Prototyping Kit and a demonstration video.



0 Comments