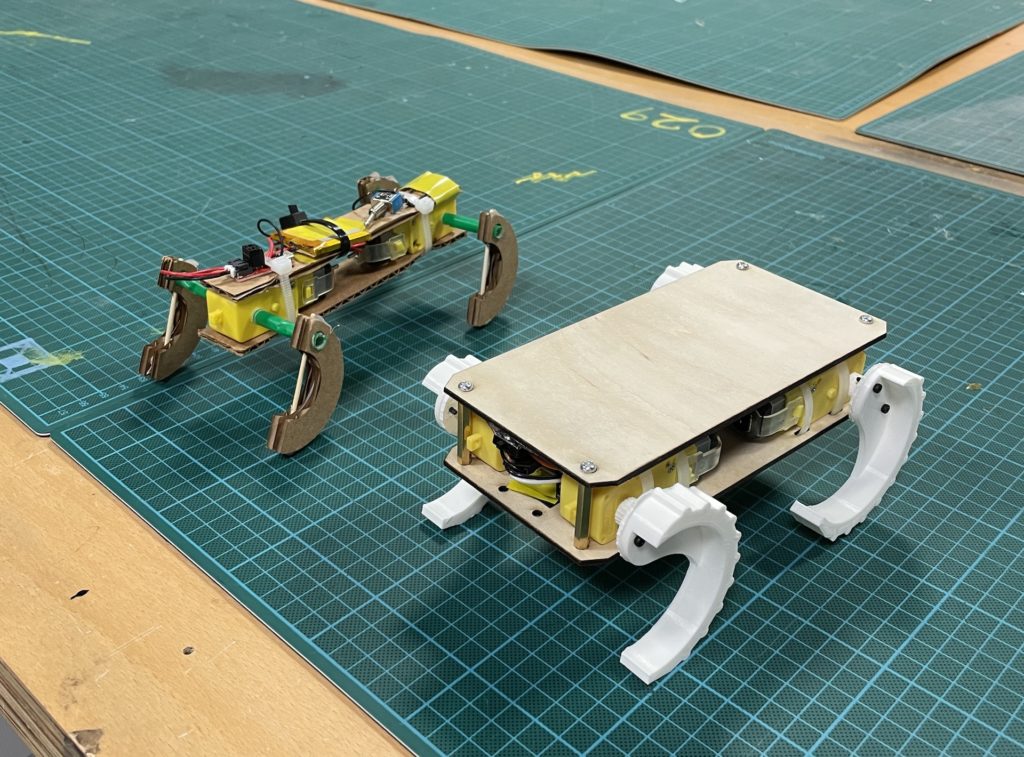
On November 21st 2021, MangLab took Wheggo Version One and Two into the desert for testing and filming. It was a sunny Sunday afternoon, four members from MangLab got to the lab early in the morning to prepare all the equipment needed for the testing. We have Wheggo Version One and Two, the router for Wheggo Two to receive the remote control signals, the 360-degree camera, professional camera, the shotgun microphones and headphones.
We tested two versions of Wheggo in the lab, grabbed our gears and supplies, changed into weatherproof clothing, and set off to the desert.
We arrived at AL Khatim desert at around 2:30 and started to set up our camp. The sand was hot but the since it’s November, the weather was manageable.

We quickly found a spot away from the highway and set our camp, took out our gear and ready to record.
For recording the sound we used the ZOOM filed recorder with a shotgun mic. For recording the video we used a 360-degree camera. Prof.Mang took great pictures and videos using a professional camera and iPhone. Micheal was controlling Wheggo to move around.


After testing Wheggo v.2 in the desert, we found out a few unique things about Wheggo v.2 than v.1:
- It left a messy trail where it digged deeper into the sand than v.1 and spread the sand around;
- Its body stomps the ground every time the front whegs are switching with the back wheg, leaving noticeable marks;
- The syncing between left side whegs and right side is a big problem for Wheggo v.2, even with remote control;
- It is harder to climb onto steep dunes than v.1; it tends to steer away from slopes and obstacles;
- While the trail of v.1 looks like an animal trail and is interesting, the trail of v.2 certainly is more destructive and human-like.
- It often sways from left to the right.
We recorded multiple scenes in different locations in the desert. Here are some interesting edited clips.
We set up after the sun went down at around 5:30.
After discussion, we assumed and summarized the key reasons for Wheggo v.2’s behaviors:
- Four motor and the battery are too heavy; –> for the stomping on the ground and the depth of the trail
- Whegs are not long enough; –> for the stomping on the ground
- The remote control is too complicated for the motors; –> for the syncing and weird behaviors
We also proposed some suggestions for future improvement for Wheggo v.3:
- Use sun-power board instead of carrying a big battery;
- Use two motors is enough and good for the syncing;
- Design a new wheg with a different shape;
We will continue working on Wheggo, the sand robot in the next semester to refine it! Wheggo still on the go :))



0 Comments