The study concerning animal locomotion over granular surfaces (here) inspired me to look into animal adaptations to travelling over (or through) sand, as well as robots designed to mimic them.
The sidewinder snake is one of the most iconic desert animals, mostly due to its distinctive movement pattern (“sidewinding”). Researchers behind Carnegie Mellon’s renowned snake robot analyzed these movement patterns in order to allow the robot to scale sand dunes and other uphill sandy environments (a feat it was unable to accomplish in the past). In particular, it was noted that the snakes climb by moving their bodies in two independently-controlled waves. By continuously adjusting the aspect ratio of those waves, both vertically and horizontally, the sidewinders can control what parts of their body are in contact with the sand. The steeper the slope, the more the total contact area.
The analyzed pattern was then successfully programmed and executed with the snake robot.

Desert ants are also adapted to traverse sandy environments with ease. Aside from being light enough to prevent serious surface penetration, the ants move with a highly regular tripod gait. AntBot is a hexapodal robot directly inspired by the locomotary patterns (and navigation techniques) of ants. It has three degrees of freedom per leg, and is fully 3D–printed. The AntBot’s walking gait obeys a fixed preprogrammed pattern, which has been successfully tested in the relevant environments.

(A) Structure of the robot with its sensors and electronic parts. (B) Hardware architecture of the AntBot robotic platform. To deal with the communications between the Raspberry Pi 2B board and the other electronic devices [the celestial compass, IMU (MinIMU-9 v3), M2APix OF sensor, and stepper motor], we developed a custom-made shield. (C) Side view and (D) top view of AntBot.
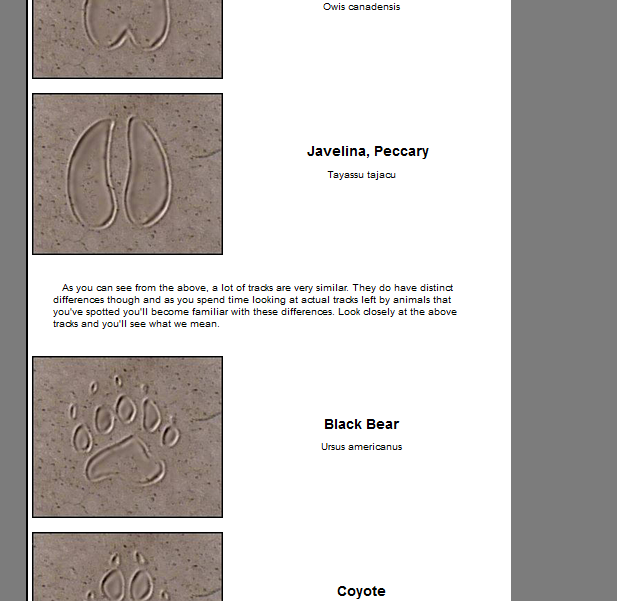
I also did preliminary research on animal tracks in the desert, to determine any adaptations that could be deduced from track patterns, as well as to get a general feel for the types of tracks we will be looking out for. The website I found discusses North American desert animals in particular.
Beach environments are also host to a multitude of organisms that have adapted to sand-based locomotion. The document below summarizes some of the main adaptations to a beach environment, specifically of smaller animals. The adaptations include burrowing adaptations, streamlined body shapes, thick shells, and often specialized breathing tubes.
The burrowing method was utilized by one project I found, using screw threads to propel the robot prototype forward over granular media. Details on the screw-based crawling robot can be found below:

One research project looks into the use of “soft robotics” for travelling through sand. Soft robotics is a field dealing with the use of compliant (or “soft”) materials in robots. Soft robotics draws heavily from the way in which living organisms move and adapt to their surroundings. In contrast to robots built from rigid materials, soft robots allow for increased flexibility and adaptability for accomplishing tasks.
The soft robot in question is based on Stanford’s search and rescue snake robot, “growing” through inflation to reach new places with its camera-outfitted tip. It’s method of locomotion is more similar to plants than that of animals, but the modifications made to it for sand burrowing brings it closer to the siphoning adaptations mentioned earlier.
The mechanism in the new burrowing snake bot uses a bioinspired strategy called granular fluidization, which suspends the particles in a fluid-like state and allows animals to overcome the high level of resistance presented by sand or loose soil. The southern sand octopus, for instance, expels a jet of water into the ground, and uses its arms to pull itself into the temporarily loosened sand. That ability made its way onto the researchers’ robot in the form of a tip-based flow device that shoots air into the region just ahead of the growing end, enabling it to move into that area.



0 Comments