Rapid Prototyping
Inspiration: 3D-Printed RC Car
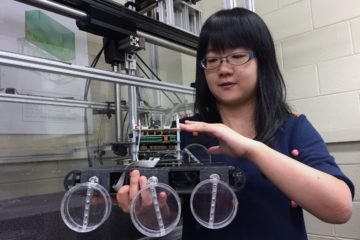
This 3D-printed RC car has some nice design elements Laser cut frame Simple 3D printed steering 3D printed tires Metal threaded inserts in the 3D printed parts to accept bolts (M3x4 knurled insert nuts) Vented body housing electronics 18650 battery pack Excellent build video The 3D printed pieces are attached Read more…